
Quanser’s QUARC® rapid control prototyping software was
specifically designed to extend Simulink’s capabilities. It does so by allowing
engineers to run Simulink models seamlessly in real-time on real hardware. Naturally
QUARC 2.3, the new version of QUARC that will be released shortly, will feature
full compatibility with the new MATLAB®/Simulink® R2012a and R2012b.
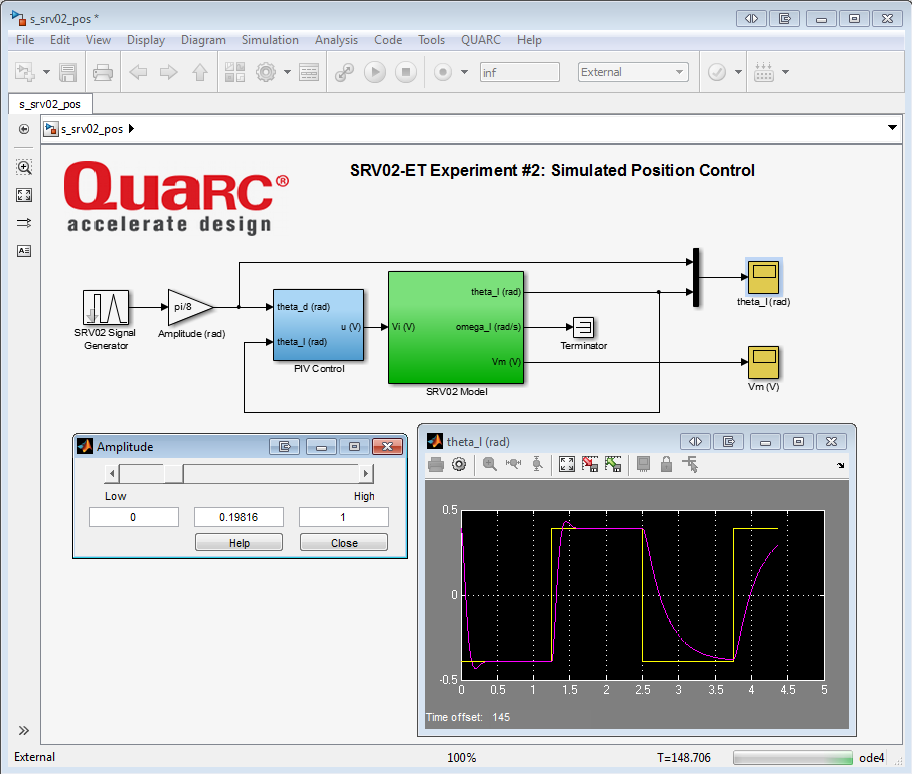 |
| Quanser will soon release QUARC 2.3 control software, which will offer full compatibility with the new MATLAB®/Simulink® R2012a and R2012b. |
Researchers and teaching professors in a variety of disciplines can implement virtually any control algorithm using QUARC. They can teach control concepts using Quanser equipment; conduct research with it on Quanser equipment; even do research with customized or third party equipment thanks to the advanced functionality and customized blocksets.
Professors and students alike can work with tremendous ease
and efficiency, since they will spend less time coding and more time on
high-level designing and testing.
Faster Design and Prototyping
An excellent example of this ease and efficiency comes from Professor
Daniela Constaninescu, of the Mechanical Engineering
Department of the University of Victoria
in Canada.
For her work developing a
cooperative haptic rehabilitation exercise, Professor Constantinescu chose
to use QUARC and Simulink with Quanser’s Haptic Wand device. QUARC software allowed her
research team to design a real-time controller quickly and made the communication with
her C++ - based simulation engine easy.
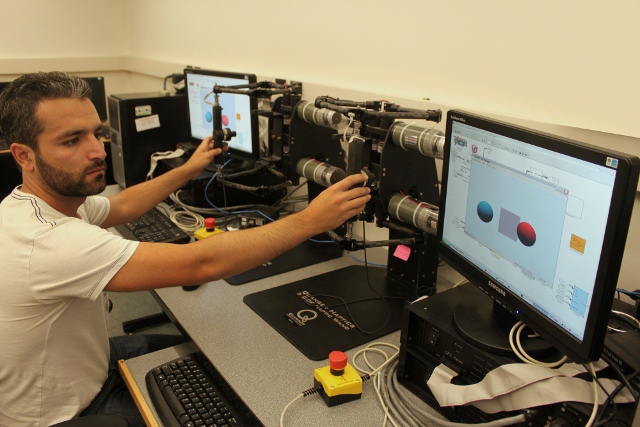 |
A researcher at the University of
Victoria performs a haptic cooperation experiment using Quanser’s Haptic Wand
device and QUARC® control software. Both the hardware and software were
reliable, time-saving tools that helped Professor Constantinescu advance her
haptic research.
|
“QUARC interfaces very easily with Simulink”, says Professor
Constantinescu. “It's excellent in terms of rapid control prototyping and it's also
very good in terms of research work where you have students working through
Simulink. It forces students to be in some ways better programmers than they
are.” As she pointed out, not all mechanical
engineers like writing code. “But now they have this ability to generate real-time
code by basically developing a Simulink model and then compiling it into real-time
code. Students can also implement new algorithms fast because they do not need
to develop their own haptic system, but only to integrate additional blocks
into an existing Simulink model. That certainly makes life much easier.”
From WinCon 1.0 to
QUARC 2.3: a History of Accelerating Design
QUARC’s history began over twenty years ago when Dr.Jacob Apkarian, Quanser’s Founder and Chief Technology Officer, wanted to
develop a graphical way of implementing feedback control design in Windows® through
pre-drawn block diagrams. He assigned that task to his Chief Scientist, Dr. Dan Madill and
WinCon 1.0 was born. “This was in the days before the existence of MATLAB’s
Simulink simulation program, recalls Dr. Madill. “When MATLAB did release
Simulink, there was still no way to do real-time coding. So we then created
WinCon 2.0, which when integrated with Simulink, automatically generated
control code and ran it in real-time.”
“WinCon worked well with successive versions of Windows but
as time went on and technical possibilities expanded, we were running into a
variety of limitations. In addition, the WinCon code building on top of earlier
Windows code was getting complicated.” The Quanser software development team took the opportunity
to completely redesign WinCon, expand its scope, and integrate it more closely
with Simulink. They also gave it a new name: QUARC.
A Real-Time Revolution
In Controls
Among the goals developed for QUARC software was a high
degree of compatibility with current and future versions of MATLAB/Simulink. QUARC works with virtually any operating
system/platform (Windows, QNX, Linux) and
uses a “wrapper layer” that abstracts the OS so that, in terms of coding, every
OS looks the same. “That leads to a consistent user experience,” says Dr. Madill.
All this makes QUARC a real-time control revolution:
extremely versatile, portable, flexible and verifiable. It is a seamless way of
running simulations and achieving real-time control. As a result, students can learn
control concepts faster and better; researchers can test their theories in
real-time, drastically reducing development time and cost; and real-world
devices are perfected sooner and fast-tracked to market.
There’s Even More To
The QUARC Story
Watch for more upcoming QUARC blog posts. We will give you some examples of how QUARC has helped professors teach controls to students and take you on an around-the-world tour to see how QUARC has helped professors and engineers in industry conduct research.
You can learn more about QUARC using an online Interactive Tutorial. Or request a free 30 day trial version of QUARC 2.3.
See you next time!
Watch for more upcoming QUARC blog posts. We will give you some examples of how QUARC has helped professors teach controls to students and take you on an around-the-world tour to see how QUARC has helped professors and engineers in industry conduct research.
You can learn more about QUARC using an online Interactive Tutorial. Or request a free 30 day trial version of QUARC 2.3.
See you next time!
No comments:
Post a Comment