What is the key advantage that professors get from using
QUARC®
rapid control prototyping software in their research? It’s simple - speed.
QUARC allows them to accelerate design and achieve their research goals in much
less time, whether they’re working in
haptics,
robotics,
unmannedvehicles or other related areas.
The fact is QUARC seamlessly integrates with
Simulink® and
takes the traditional design-to-implementation interface toolset to new levels.
As a result, researchers experience more functionality and more development
flexibility, all geared towards improved real-time testing and performance.
All around the world, academic researchers are using QUARC
to quickly turn ideas into prototypes, saving themselves months, and in some
cases years, of development time. In today’s time and budget-constrained
academic research environment, that’s an advantage of major proportions.
Read on and learn how some professors are advancing their
research at a rapid pace by using QUARC.
Design complex
control processes with ease
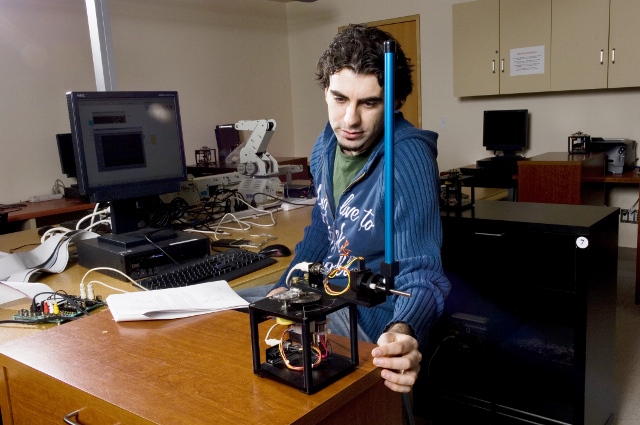
“We develop control algorithms for a rehabilitation robot
designed and manufactured by Quanser. The device is designed to help stroke
survivors perform upper limb movement therapy exercises. We are especially
interested in using robotically-captured records of patients’ motions to
accurately measure their motor performance, enabling clinicians to design
optimal therapy interventions that will help maximize recovery.
 |
| Using QUARC, University of Alberta researcher Matthew Dyck was able to quickly develop control algorithms for a rehabilitation robot designed to help stroke survivors perform upper limb movement therapy exercises. (Photo courtesy of University of Alberta) |
Our robot and its associated sensors are programmed,
monitored, and controlled entirely through QUARC. QUARC makes it
possible for us to design complex control solutions with ease, and enables us
to fine-tune those algorithms in real time as they are implemented on physical
hardware.
QUARC rapidly accelerates the process of translating an idea
into
a tangible,
functioning prototype. Through its high-level programming environment,
QUARC enables engineers to focus on designing innovative solutions rather than
troubleshooting programming errors. QUARC’s advanced functionalities have both
simplified and supercharged our real-time, hardware-in-the-loop programming and
offline simulations.”
- Matthew Dyck, E.I.T., M.Sc. Student, Electrical and Computer
Engineering, University of Alberta, Canada
A tremendous help for research in distributed sensing systems
“QUARC's support of TCP/IP has been a tremendous help for our research. It allowed us to develop a distributed sensing system that isn't dependent on expensive I/O hardware or DAQ boards. Further, this allows for safety-critical redundancy when we are doing vehicle control tests.”
- Professor Sean Brennan, Mechanical and Nuclear Engineering, Penn State University, USA
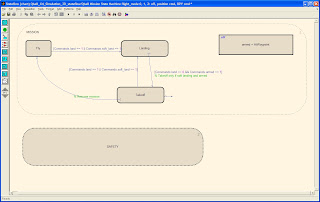
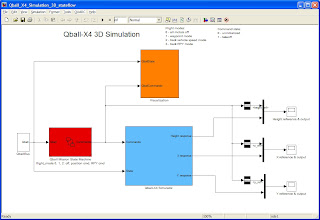
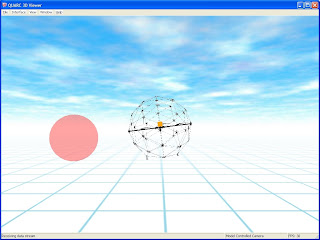
Flexibility and ease of development in autonomous flight systems research
“We are using the Quanser Qball to conduct research into a
number of areas. First, we are looking at designing cooperative flight and sightline
controllers for practical laser wireless power transfer. We are building a laser transceiver to mount
on the Qball and a ground-based laser pointer. Another area is using the Qball to demonstrate the effectiveness of
nonlinear flight stabilization controllers for constrained flight in
atmospheric turbulence. We chose Quanser
for our lab for a number of reasons, but primarily because of the flexibility
and ease of development provided by QUARC.”
- Professor David Anderson, MAST Lab and Aerospace Science
Research Division, University of Glasgow, UK
Gather information
quickly
“The computational speed and the communication speed between
the Quanser Q8 data acquisition board and the QUARC environment is
excellent, and completely fulfilled our needs. So we were able to gather
information quickly, learn what worked and didn't work, then implement the
necessary rapid design changes to the controller.”
- Professor Marcia O’Malley, Department of Mechanical
Engineering, Rice University, USA
Faster development
and a clearer control sequence
“Our lab is developing haptic devices and VR systems.
Conventionally, we use VC++ and OpenGL to develop the control system and the
visual interface. With Q8 and QUARC,
I can now do the same thing faster and the control sequence is much clearer
than before.”
- Yi Yang, Ph.D Student, Human Machine Interaction &
Robotics, Beihang University, China
Students can implement
new algorithms quickly
“QUARC interfaces very easily with Simulink.
It's excellent in terms of rapid prototyping and it's also very good in terms
of research work where you have students working through Simulink. It forces
students to be in some ways better programmers than they are. Let's face it,
some mechanical engineers don't necessarily like writing code, but now they
have this ability to generate real time code by basically developing a Simulink
model and then compiling it into real time code. Students can also implement
new algorithms fast because they do not need to develop their own haptic system,
but only to integrate additional blocks into an existing Simulink model. That
certainly makes life much easier.”
- Professor Daniela Constaninescu, Department of Mechanical
Engineering, University of Victoria, Canada
If we had been aware
of QUARC when we began,
we could have saved two years
“QUARC has made our programming faster and more
robust. More importantly, it allowed us to move forward quickly by unifying our
old and new programming platforms.”
“By understanding two different programming languages, QUARC
helped us to prototype the system and produced a working simulation very, very
quickly. In one week we installed QUARC, took the interactive tutorial available
online from Quanser and used QUARC successfully to do rapid prototyping of the
experiment. It just worked as we intended it to. We did high level programming
of the robot's vision-based controller very quickly and accurately. If we had
been aware of QUARC when we began this assistive robotic project, it would have
sped up our work a great deal. We could have saved two years.”
- Professor Aman Behal, Electrical Engineering and Computer
Science, University of Central Florida, USA
To find out how a wide range of blocksets in QUARC 2.3 are tailored for researchers,
click here.

 Getting started with QUARC®, Quanser's real-time rapid control prototyping software? Or want to learn more about how it can simplify your controls teaching and research? Then join Quanser online on Tuesday, January 28, 2014 at 2 PM EST to get an assistance and answers from Quanser engineers.
Getting started with QUARC®, Quanser's real-time rapid control prototyping software? Or want to learn more about how it can simplify your controls teaching and research? Then join Quanser online on Tuesday, January 28, 2014 at 2 PM EST to get an assistance and answers from Quanser engineers. 
.jpg)




 Several Canadian companies mentioned in a recent
Several Canadian companies mentioned in a recent 




{kind=link}